Yuyang (Johnny) Ma
Ph.D. Student @ USC | Industrial & Systems Engineering
Yuyang Ma is a Ph.D. student in the Daniel J. Epstein Department of Industrial and Systems Engineering at University of Southern California. He received a master's degree in operations research from Georgia Institute of Technology in 2022. Prior to that, he received a bachelor's degree in industrial engineering from the University of Pittsburgh (Pittsburgh, United States) and a bachelor's degree in industrial engineering from Sichuan University (Chengdu, China). Yuyang's research interests lie in optimization under uncertainty and corresponding applications. He is currently working with Dr. Karmel S. Shehadeh.
News
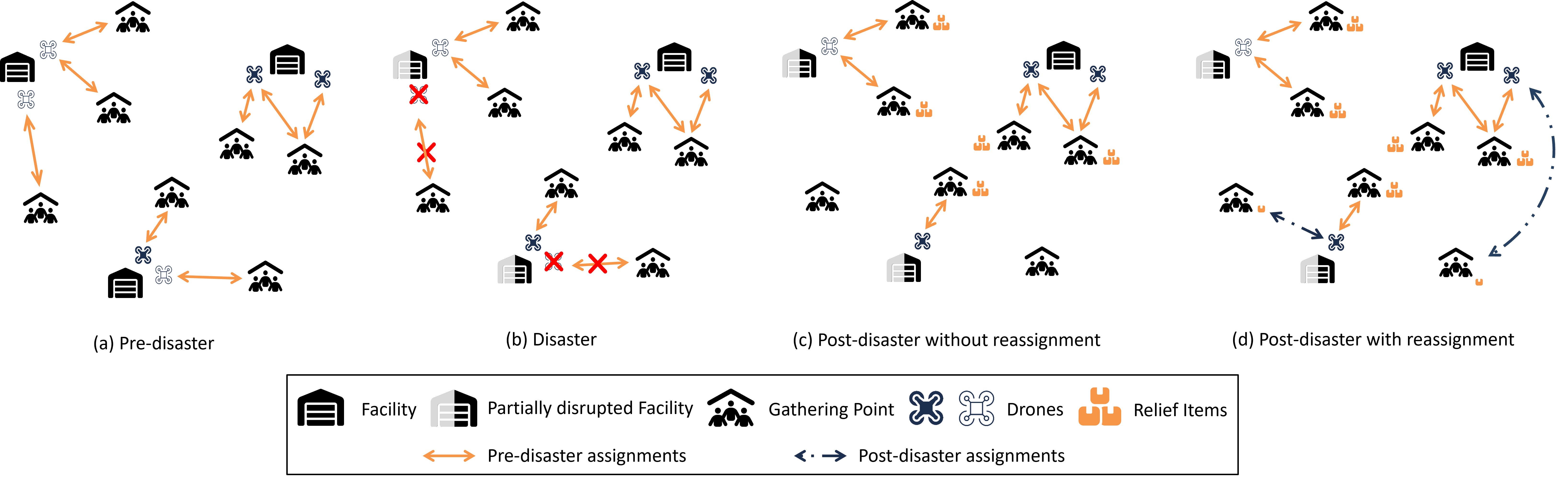
Our paper "Integrated Planning of Drone-Based Disaster Relief: Facility Location, Inventory Prepositioning, and Fleet Operations under Uncertainty" can be now accessed on SSRN 🥳.
I am now continuing my Ph.D. journey at University of Southern California.
I am honored to obtain Master's degree from Georgia Tech.
Selected Works
Teaching
Lehigh University
-
Teaching Assistant: ISE 230 Introduction to Stochastic Models in Operations ResearchFall 2024
-
Teaching Assistant: DSCI II 311 Optimization and Mathematical Foundations for Data ScienceSummer 2024
Georgia Institute of Technology
-
Teaching Assistant: ISYE 8803 Topics on High-Dimensional Data AnalyticsFall 2022
Contact
The best way to contact is through e-mail (yuyangm 'at' usc 'dot' edu). Please indicate the purpose of the e-mail in the subject line, and I will try to respond as soon as possible. Besides, you can also reach me through the following ways:
Email & Phone
- yuyangm@usc.edu (Work)
- yuyang0227@outlook.com (Personal)
- +1 (470) 457-9866
Office Address
3650 McClintock Ave, Room 304Los Angeles, CA 90089